首頁 > 產(chǎn)品世界 > 礦山救援 > 偵測搜尋 > 生命探測儀
信息發(fā)布方北京凌天
型號YSR25
產(chǎn)品商標(biāo)
聯(lián)系電話010-51652021 13370188210
促銷價
瀏覽次數(shù)6201




























研發(fā)方:北京天必達(dá)科技有限公司
1概述
YSR25本安型雷達(dá)生命探測儀是一種微波生命探測設(shè)備,適用于在自由空間和穿透非金屬介質(zhì)進(jìn)行生命探測,主要用來對被掩埋在倒塌建筑物、廢墟、土壤中的人類幸存者或?qū)煛㈧F等環(huán)境中的人類生命體進(jìn)行探測搜尋。具有體積小、重量輕、結(jié)構(gòu)簡單、人機(jī)界面好、操作簡便、抗干擾能力強(qiáng)、環(huán)境適應(yīng)性強(qiáng)等特點。
★產(chǎn)品入選新技術(shù)新產(chǎn)品(服務(wù))名單,并提供證書,入選信息網(wǎng)絡(luò)可查”
2.1 構(gòu)成
YSR25本安型雷達(dá)生命探測儀主要由雷達(dá)探測器和顯示控制器兩部分組成,還包括備用電池、雷達(dá)探測器充電器、顯示控制器充電器、包裝箱及海綿內(nèi)襯。
2.2 工作原理
本安型雷達(dá)生命探測儀采用超寬帶探測雷達(dá)技術(shù),通過超寬帶天線向外輻射電磁脈沖,當(dāng)天線前方遇到人體生命活動,如呼吸、心跳、身體蠕動等,會反射載有人體生命特征信號的電磁波,對該信號處理后,還原成人體生命特征,并在顯示控制器上顯示探測結(jié)果,從而實現(xiàn)“生命探測”的功能。
① 探測距離:張角為120°的圓錐體區(qū)域,最大探測距離超過,根據(jù)現(xiàn)場環(huán)境的不同,探測距離會受到一定程度的影響;
② 目標(biāo)響應(yīng)時間:< 50s;
③ 穿透能力:可穿透非金屬障礙物進(jìn)行探測。參考數(shù)據(jù):兩道磚混結(jié)構(gòu)承重墻后5m的人體呼吸信號或三道磚混結(jié)構(gòu)承重墻后5m的人體運動信號;
④ 無線通訊能力:雷達(dá)探測器與顯示控制器之間的無遮擋、無線通訊距離超過50m;
⑤ 測距精度:≤±0.5m(無遮擋狀態(tài)下);
⑥ 工作溫度:雷達(dá)探測器 -10℃~+50℃;
顯示控制器 -30℃~+60℃;
⑦ 連續(xù)工作時間:≥5h 。
4.1 包裝
本裝備采用高抗沖擊工程塑料注塑成型包裝箱包裝,箱體外徑為600mm×500mm×350mm,橙色;箱體具有較強(qiáng)的防塵、防水、防腐性能,即使在惡劣環(huán)境也可有效保護(hù)箱體內(nèi)設(shè)備;包裝箱內(nèi)部為防靜電海綿內(nèi)襯,預(yù)先切成所需的形狀,用于放置各種配件。
4.2 標(biāo)志
外包裝箱和雷達(dá)探測器銘牌上分別標(biāo)明了生產(chǎn)廠家名稱、產(chǎn)品名稱、產(chǎn)品編號和產(chǎn)地。
外包裝箱和雷達(dá)探測器文字標(biāo)志
使用操作
5.1 展開及探測方式。
將雷達(dá)探測器放置在合適的位置,探測面朝向需要探測的區(qū)域。在探測過程中,可根據(jù)現(xiàn)場環(huán)境和條件,將雷達(dá)探測器放置在不同位置進(jìn)行探測。其探測方式如下:
① 俯視探測:當(dāng)救援人員需要對廢墟底下進(jìn)行探測,確定是否有被困人員時,可以選擇將雷達(dá)放置在廢墟上面,救援人員直接使用顯示控制器,快速找出被困人員。
② 側(cè)面探測:當(dāng)無法直接從廢墟頂部探測時,可以將雷達(dá)從側(cè)面用支架架起,探測被困人員的具體狀況。
③懸掛探測:受現(xiàn)場環(huán)境的限制,救援人員無法近距離接觸災(zāi)害發(fā)生地,可以將雷達(dá)用吊鉤懸掛起來,對廢墟進(jìn)行各個方位的探測。
5.2 雷達(dá)開機(jī)。
① 按下雷達(dá)探測器的電源開關(guān),如圖2所示,將電源打開。
② 顯示控制器電源開關(guān)位于顯示控制器底側(cè),如圖4所示,將撥碼開關(guān)向右撥到“on”,則顯示控制器電源打開,屏幕顯示圖5所示的開機(jī)界面,系統(tǒng)將自動建立Wi-Fi無線通信網(wǎng)絡(luò)。

5.3 進(jìn)入雷達(dá)探測軟件。
顯示控制器與雷達(dá)探測器建立無線連接后,按下“快捷訪問鍵”軟鍵(圖3所示的2鍵),屏幕將顯示雷達(dá)探測軟件快捷方式,如下圖6所示。

點擊雷達(dá)軟件快捷方式,屏幕將顯示圖7雷達(dá)開啟界面。等待2s后,進(jìn)入軟件工作界面,見圖8,根據(jù)雷達(dá)的最大對空探測距離,工作界面自動劃分為0~3m、3~6m、6~9m、9~12m、12~15m、15~18m、18~21m和21~24m八個區(qū)域。屏幕上會出現(xiàn)無線網(wǎng)絡(luò)連接標(biāo)識、開始探測軟鍵、停止探測軟鍵、查看結(jié)果軟鍵、操作選擇軟鍵、雷達(dá)狀態(tài)和探測結(jié)果顯示區(qū)。
圖7 雷達(dá)軟件開啟界面

工作狀態(tài)配置:進(jìn)入軟件工作界面后,顯示控制器將與雷達(dá)探測器進(jìn)行無線網(wǎng)絡(luò)和雷達(dá)工作狀態(tài)的自動配置,配置過程大概需要2s時間(視工作現(xiàn)場復(fù)雜程度而定),配置完成后無線網(wǎng)絡(luò)標(biāo)識顯示“已連接”,雷達(dá)狀態(tài)為“設(shè)備就緒”。
5.4 模式選擇。
在開始探測前,可進(jìn)行模式選擇操作,若未進(jìn)行此步操作則系統(tǒng)會選擇默認(rèn)的探測方式,即多目標(biāo)模式從0米位置開始探測。點擊“操作選擇”軟鍵后軟件界面如下圖9示。

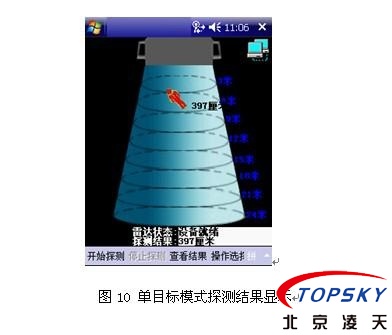
這里0米、……21米指的是雷達(dá)探測區(qū)域的起始位置,單目標(biāo)模式指的是在雷達(dá)探測過程從所選擇的起始位置開始探測若檢測到目標(biāo)人體即自行停止雷達(dá),如下圖10所示。
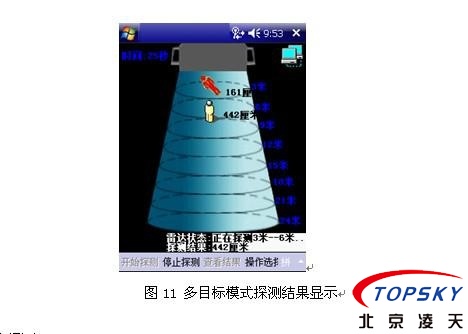
多目標(biāo)模式指的是在雷達(dá)探測過程從所選擇的起始位置開始探測不論是否檢測到目標(biāo)人體在不進(jìn)行人為干涉情況下雷達(dá)會繼續(xù)探測后續(xù)區(qū)域直到最后一段區(qū)域(21米~24米)結(jié)束才自行停止雷達(dá)。如圖11所示。
5.5 開始和停止探測。
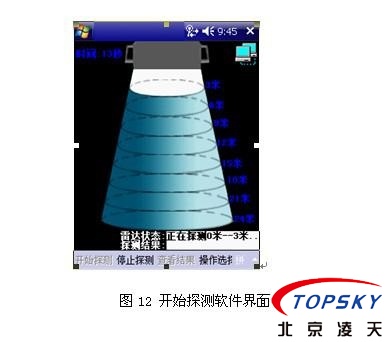
用觸控筆點擊屏幕上的“開始探測”軟鍵,顯示控制器將會向雷達(dá)探測器發(fā)送工作指令,雷達(dá)狀態(tài)欄將顯示“正在發(fā)送命令.....”,命令發(fā)送完成后將提示“發(fā)送命令成功!”,雷達(dá)探測器將從人為設(shè)定區(qū)域開始探測或從系統(tǒng)默認(rèn)的0m開始掃描0~3m目標(biāo)區(qū)域,雷達(dá)狀態(tài)欄將顯示“正在探測0米—3米..”,顯示控制器上對應(yīng)的0~3m區(qū)域?qū)⒉粩嚅W爍,同時屏幕上會顯示當(dāng)前區(qū)域并記錄探測用時時間,見圖12。
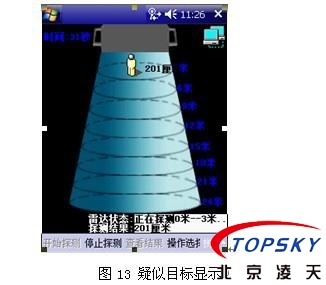
在每段探測過程需要一定時間來進(jìn)行雷達(dá)數(shù)據(jù)采集、分析以確定此段是否存在人體目標(biāo),中間若發(fā)現(xiàn)疑似人體目標(biāo)則會進(jìn)行結(jié)果顯示,如圖13所示。
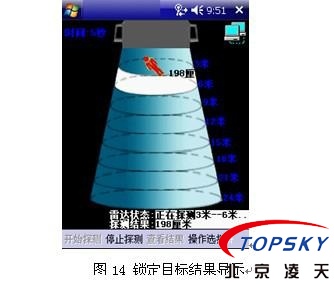
如果被測0~3m區(qū)域內(nèi)有人體目標(biāo),系統(tǒng)會在75s內(nèi)鎖定目標(biāo),并會彈出一個“小紅人”,同時顯示控制器會發(fā)出“嘟嘟嘟”三聲報警聲,在探測結(jié)果顯示區(qū)內(nèi)顯示目標(biāo)距離雷達(dá)探測器的距離,即目標(biāo)壓埋深度。鎖定目標(biāo)后雷達(dá)會按照預(yù)先設(shè)置好的工作模式進(jìn)行工作,若選擇單目標(biāo)模式則雷達(dá)自行停止工作,若選擇多目標(biāo)模式則雷達(dá)會自動跳轉(zhuǎn)到下一個探測區(qū)域進(jìn)行探測。如圖14所示。
如果0~3m區(qū)域無目標(biāo),系統(tǒng)在進(jìn)行必要的核實、確認(rèn)過程后會自動進(jìn)入下一區(qū)域進(jìn)行探測。如果在被測區(qū)域內(nèi)沒有生命體目標(biāo),雷達(dá)在完成對21~24米探測區(qū)域的掃描、探測后會自動停止本次探測過程。
掃描、探測過程中,操作人員用觸控筆點擊屏幕上的“停止探測”軟鍵,也可以停止探測過程,系統(tǒng)將返回到圖8界面。
按下 “開始探測鍵”可以再次啟動探測。
注意
YSR25本安型雷達(dá)生命探測儀具備無線網(wǎng)絡(luò)自動配置、連接功能,顯示控制器在出廠前已經(jīng)配置完畢,使用人員不能隨意修改其設(shè)置選項或執(zhí)行其他無關(guān)操作,以免影響系統(tǒng)工作。
若由于異常情況導(dǎo)致無線網(wǎng)絡(luò)無法正常連接,請先關(guān)閉雷達(dá)探測器電源再重新打開,并將顯示控制器重啟。為使設(shè)備達(dá)到效果,建議開機(jī)預(yù)熱3~5分鐘后再進(jìn)行探測。
5.6 查看探測結(jié)果。
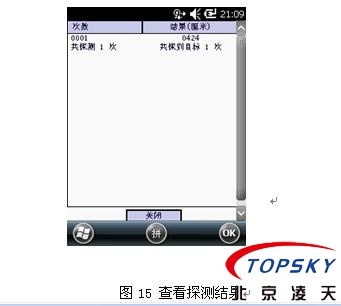
在完成一次探測操作、雷達(dá)在“停止探測”狀態(tài)下,用觸控筆點擊屏幕上的“查看結(jié)果”軟鍵,會彈出圖15所示畫面,可以查看本次或以往探測結(jié)果的記錄。
點擊“停止探測/返回系統(tǒng)鍵”軟鍵則退出雷達(dá)軟件,返回至顯示控制器主界面。
5.7 距離修正。
在實際應(yīng)用中,距離修正是為了便于操作人員結(jié)合作業(yè)現(xiàn)場廢墟情況和雷達(dá)探測結(jié)果,對目標(biāo)位置進(jìn)行更判斷的一種補(bǔ)償手段。
常見煤礦材質(zhì)距離修正值見下表。
物體名稱 | 厚度(cm) | 介電常數(shù) | 距離修正值(cm) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
注意
由于電磁波在介質(zhì)中的傳播速度較空氣要慢,實際應(yīng)用中顯示控制器顯示距離會比目標(biāo)實際位置要大,故需要對顯示距離信息進(jìn)行修正,顯示距離值減去修正值才更接近目標(biāo)的真實位置。
5.8 關(guān)機(jī)操作。
按下顯示控制器的“停止探測/返回系統(tǒng)鍵”(見圖3的1鍵)將退出雷達(dá)探測軟件。
見圖4所示,將顯示控制器電源開關(guān)向左撥至“off”位置即可關(guān)閉顯示控制器電源開關(guān)。
接著按下雷達(dá)探測器“電源開關(guān)鍵”,關(guān)閉雷達(dá)探測器。
5.9 更換雷達(dá)探測器電池操作。
YSR25本安型雷達(dá)生命探測儀的雷達(dá)探測器配備了兩塊可充電鋰離子電池,其插拔、更換步驟如下,見圖16。
步驟一:將雷達(dá)探測器電池艙上的旋鈕向左轉(zhuǎn)動45°(見圖16-1和圖16-2)
步驟二:用力捏住旋鈕將電池向外拔出(見圖16-3)
步驟三:將電池體沿安裝滑軌方向退出(見圖16-4)
步驟四:將新電池沿安裝滑軌方向用力滑進(jìn)并卡住(見圖16-5)
步驟五:將裝好的新電池插入電池倉(見圖16-6),插到位后把旋鈕向右轉(zhuǎn)動45°恢復(fù)到圖16-1的正常狀態(tài)。

使用注意事項:
(1)操作人員在探測時應(yīng)站在雷達(dá)探測器天線面后方,距離雷達(dá)探測器5m以外,保持靜止,以免造成虛警。
(2)改變探測位置時,視距離遠(yuǎn)近,可采用關(guān)機(jī)或不關(guān)機(jī)兩種方式移動雷達(dá)探測器。
(3)每點擊一次控制按鍵,應(yīng)等待一定時間,確保指令發(fā)送成功,并由系統(tǒng)完成此指令,再進(jìn)行下一步操作。禁止在不同控制按鈕之間頻繁點擊。
(4)應(yīng)先正常退出雷達(dá)探測軟件,再關(guān)閉雷達(dá)探測器電源。
(5)電磁波不能穿透大面積金屬障礙物,請勿直對大面積金屬障礙物進(jìn)行探測。
(6)YSR25本安型雷達(dá)生命探測儀發(fā)射的電磁波長時間(超過30min)對人體進(jìn)行直接照射時,會對人體造成一定傷害。因此,在開機(jī)狀態(tài)下,人員應(yīng)避免長時間被照射。
(7)為保證YSR25本安型雷達(dá)生命探測儀正常工作,應(yīng)使用原廠配件以及充電器等。
序號 | 故障現(xiàn)象 | 原因 | 排除方法 | 備注 |
1 | 雷達(dá)開啟后,顯示控制器的無線網(wǎng)絡(luò)不能正常連接。 | ① 電磁干擾。 | ①檢查使用現(xiàn)場是否存在較強(qiáng)的電磁干擾源或?qū)⒃O(shè)備進(jìn)行了不當(dāng)?shù)恼趽鹾推帘危绻性O(shè)法排除。 |
|
②雷達(dá)探測器電量耗盡。 | ②更換電池。 |
| ||
③顯示控制器系統(tǒng)死機(jī)。 | ③重啟顯示控制器。 |
| ||
2 | 顯示控制器不能啟動。 | ① 電池耗盡。 | ① 電池充電。 |
|
② 顯示控制器損壞。 | ② 返廠維修。 |
|
7.1 日常保養(yǎng)
每次使用完畢,按以下步驟對YSR25本安型雷達(dá)生命探測儀進(jìn)行保養(yǎng)。
步驟一:關(guān)閉電源并拔掉外接電源線,拆除所有的連接線;
步驟二:用小吸塵器將連接口、鍵盤縫隙等部位的灰塵吸出;
步驟三:用干布略沾濕再輕輕擦拭各部件。
電池的充電。
雷達(dá)探測器和顯示控制器均采用可充電式鋰離子電池供電,日常使用后,若發(fā)現(xiàn)電池電量不足,應(yīng)及時給電池充電,具體充電方法如下:
(1) 雷達(dá)探測器充電
充電方法:
① 取出雷達(dá)探測器的充電器。
② 將充電器防水充電插頭插入雷達(dá)探測器的充電接口(見圖18),充電插頭具有自鎖緊功能。
③ 將充電器電源插頭接入交流220V電源。
④ 充電器上的“充電指示燈”(見圖18)紅燈亮,表示正在充電。
⑤ “充電指示燈”(見圖18)由紅色轉(zhuǎn)為綠燈,表示完成充電。
注意:
① 雷達(dá)探測器電池的建議充電時間為6小時。
② 在“充電指示燈”轉(zhuǎn)為綠色后,繼續(xù)通電時間不要超過6小時。
③ 充電時,充電器會因自身功耗而散發(fā)熱量,應(yīng)保持良好的通風(fēng)環(huán)境,以免充電器損壞或降低使用壽命。
(2)顯示控制器充電
充電方法:
① 取出顯示控制器充電器。
② 將充電器一端插入交流220V電源插座,另一端插入顯示控制器充電插口,即開始充電,建議充電時間12h。
③ 通過顯示控制器屏幕右上角充電指示符號察看充電情況,充滿電后將充電器取下。
7.2 定期保養(yǎng)
長期存放時,每月應(yīng)對YSR25本安型雷達(dá)生命探測儀進(jìn)行開機(jī)檢查,檢查系統(tǒng)工作狀態(tài)和電池電量,發(fā)現(xiàn)電池電量不足應(yīng)及時充電。
8.1 運輸
運輸時,應(yīng)將雷達(dá)裝箱并鎖緊箱扣。
要輕拿輕放,不要故意摔、敲或震動雷達(dá)裝備,防止日曬雨淋、油污、相互碰撞或受重物擠壓。
8.2 儲存
較長時間不使用雷達(dá)時,應(yīng)將雷達(dá)裝箱存放。
雷達(dá)存放地應(yīng)盡量保持通風(fēng)、干燥、清潔和無塵。
9.1 裝備成套清單
雷達(dá)探測器 1臺
顯示控制器 1臺
備用電池 1塊
雷達(dá)探測器充電器 1個
顯示控制器充電器 1個
使用維護(hù)說明書 1份
9.2 售后服務(wù)
本裝備保修期為1年。
注明未取得安標(biāo)前,僅用于地面!
 礦用雷達(dá)生命探測儀(二維,探測42米,電池更換)【第1代】ysr 010-51652021 13370188210
礦用雷達(dá)生命探測儀(二維,探測42米,電池更換)【第1代】ysr 010-51652021 13370188210  防爆無線音視頻生命探測儀V9 010-51652021 13370188210
防爆無線音視頻生命探測儀V9 010-51652021 13370188210  音視頻生命探測儀 010-51652021 13370188210
音視頻生命探測儀 010-51652021 13370188210  本安型雷達(dá)生命探測儀 010-51652021 13370188210
本安型雷達(dá)生命探測儀 010-51652021 13370188210  官方微信
官方微信 手機(jī)二維碼
手機(jī)二維碼關(guān)于凌天 | 產(chǎn)品世界 | 新聞中心 | 資質(zhì)榮譽(yù) | 產(chǎn)品資質(zhì) | 聯(lián)系我們
版權(quán)所有:北京凌天智能裝備集團(tuán)股份公司版權(quán)所有 京ICP備05037112號-1
010-51652021 13370188210 北京市通州區(qū)中關(guān)村科技園區(qū)通州園金橋科技產(chǎn)業(yè)基地環(huán)科中路17號聯(lián)東U谷研創(chuàng)企業(yè)園10B








